智能掘进系统-凯发官网首页

智能掘进系统
具有全方位参数智能感知、状态监测与故障诊断、自主导航与纠偏、自动截割与远程操控、全流程一键启停控制、多系统融合联动、数字孪生场景再现等功能模块,实现掘进机高精度定向、位姿调整、自适应截割及掘进环境可视化,具备掘进作业设备机群自主决策控制功能,形成掘进工作面掘支锚运高效协同、一键启停、自动掘进、自主决策与智能控制的智能掘进作业体系。
智能感知与故障自诊断

部署设备状态监测、运行工况监测及环境监测等多种类传感器,多角度、全方位跟踪掘进机及配套设备的各类参数及运行工况,智能分析掘进作业环境、设备运行状态及健康状况,实现故障在线诊断和全生命周期管理。
位姿监测
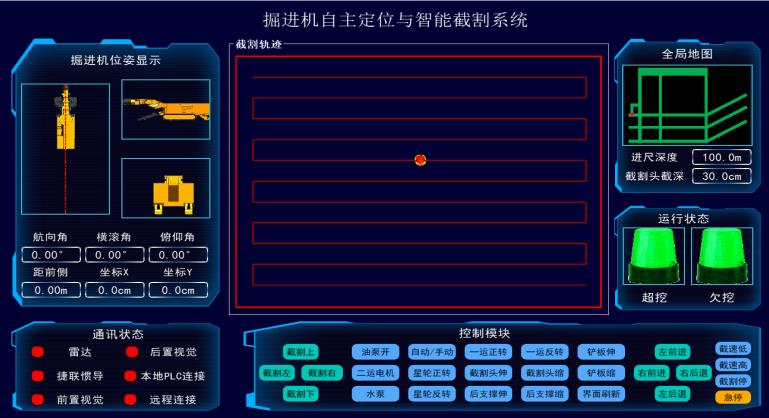
综合利用高精度光纤惯性导航、机器视觉、运动控制与精确定位等多种技术,结合设备运动参数和运行状态数据,实时感知掘锚机在掘进巷道中的位置和姿态,内置数学模型和耦合算法,实现位姿监测与智能截割作业。
掘进后配套系统联动
实现掘进工作面运输、排水、供电、除尘等系统与掘锚机的远程联动自动运行,实现掘进工作面安全管控系统联锁控制。
智能截割作业
基于位姿监测、智能感知系统和高性能控制器运动控制算法,实现掘锚机自动纠偏、自主导航、记忆截割、自适应截割、仿形截割与自动截割功能。
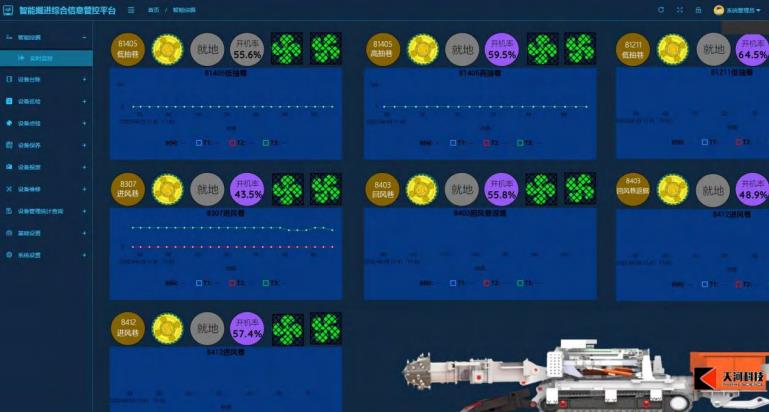
自适应除尘智能控制
动态感知掘进工作面环境参数,自适应动态调节局扇压风和除尘抽风风量,实现压抽比动态智能匹配与闭环控制,实现掘进工作面智能降尘控尘。
数字孪生与掘进联动
掘进巷道及装备三维建模,根据进尺自动延伸与虚拟掘进联动。


{kind=link}
上一个:
矿用多功能安装车
下一个:
单臂多功能液压锚杆钻车
top
0537-5529666
